お知らせ
(2026.06.29〜07.01)ロボティクスメカトロニクス講演会2026で発表しました.
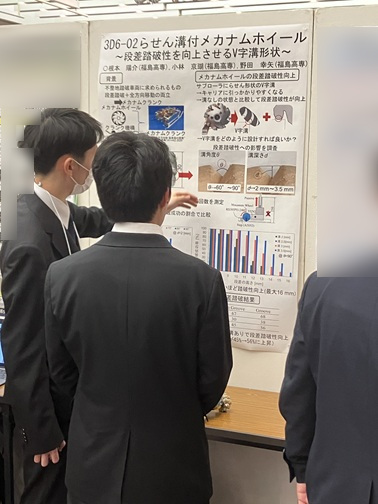
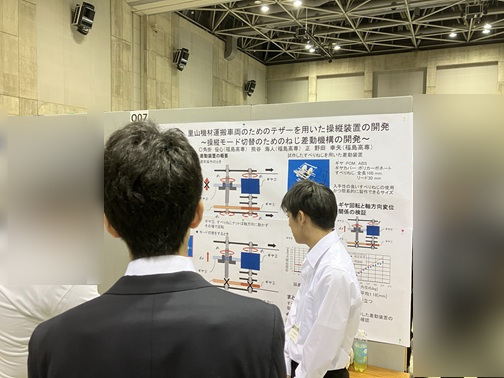
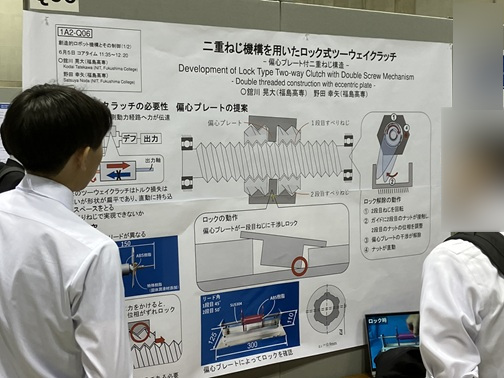
(2025.12.10〜12)計測自動制御工学会SI部門で発表しました.
→
1,
2
{kind=link}
{kind=link}
(2025.09.02〜05)第43回 日本ロボット学会学術講演会で発表しました.
(2025.06.04〜06)ロボティクスメカトロニクス講演会2025で発表しました. → 1, 2, 3, 4
{kind=link}
{kind=link}
{kind=link}
{kind=link}
(2024.12.18〜20)計測自動制御工学会SI部門で発表しました.
→
1,
2,
3
{kind=link}
{kind=link}
{kind=link}
(2024.09.03〜06)第42回 日本ロボット学会学術講演会で発表しました.
(2024.05.29〜31)ロボティクスメカトロニクス講演会2024で発表しました.
→
1,
2,
3
{kind=link}
{kind=link}
{kind=link}
(2023.12.14〜16)計測自動制御工学会SI部門で発表しました.
(2023.09.11〜14)第41回 日本ロボット学会学術講演会で発表しました.
(2023.06.28〜30)ロボティクスメカトロニクス講演会2023で発表しました.
→
1,
2,
3
{kind=link}
{kind=link}
{kind=link}
(2022.12.14〜16)計測自動制御工学会SI部門で発表しました.
→
1,
2
{kind=link}
{kind=link}
(2022.09.05〜08)第40回 日本ロボット学会学術講演会で発表しました.
(2022.07.23)第5回福島テックプラングランプリで発表しました.
受賞「フォーカスシステムズ賞」
発表タイトル 段差に強い不整地対応全方向移動車輪ロボット
チーム名 シャル・ウィール・ダンサ
(2022.06.01〜03)ロボティクスメカトロニクス講演会2022で発表しました.
過去のお知らせ
(2021.12.15〜17)計測自動制御工学会SI部門で学生が発表しました.
(2021.06.06〜08)ロボティクスメカトロニクス講演会2021で発表しました.
(2021.05.31〜06.03)IEEE International Conference on Robotics and Automation 2021 (ICRA2021)で発表しました.
(2021.03.16〜17)第26回ロボティクスシンポジアで野田が招待講演を行いました.
(2020.12.16〜18)計測自動制御工学会SI部門で発表しました.
(2020.05.27〜29)ロボティクスメカトロニクス講演会2020で野田が発表しました.
受賞「部門優秀論文表彰」
論文 二重ダイヤフラム型起歪体による鉗子カセンサの力分解能等方化
受賞者 野田幸矢 高山俊男 小俣透
(2020.03.15〜16)第25回ロボティクスシンポジアで野田が発表しました.
(2019.12.12〜14)計測自動制御工学会SI部門で学生が発表しました.
→
1,
2
{kind=link}
{kind=link}
(2019.12.01)「青少年のための科学の祭典第19回・日立大会」に参加しました.
→「B4ゴム鉄砲をつくろう!!!!」の出展を協力しました.
(2019.07.08)元気応援!!郡山わくわくフェスタ(19.07.07)に参加しました.
→「溶かした金属によるキーホルダ作り」を福島高専のブースにて行いました.
→
1,
2
{kind=link}
{kind=link}
(2019.06.05〜07)ロボティクスメカトロニクス講演会2019で発表しました.
→
1,
2,
3
{kind=link}
{kind=link}
{kind=link}
(2019.05.07)第54回郡山市こどもまつり(19.05.05)に参加しました.
→1, 2
{kind=link}
{kind=link}
(2019.03.23)第22回 ロボットグランプ大道芸ロボット競技にラボメンバーが参加しました.
(2019.03.07)県内大学発 技術シーズ説明会で野田が講演しました.
(2019.02.13)いわき市立平第五小学校に出前授業を行いました.
(2018.12.23)第二ブロック研究交流会に参加しました.
(2018.12.13〜15)計測自動制御工学会SI部門で学生が発表しました.
(2018.06.03〜05)ロボティクスメカトロニクス講演会2018で野田が発表しました.
概要
福島工業高等専門学校機械システム工学科野田研究室のホームページです. 学校からの正式な許可がないためあくまで野田個人運営のサイトです.その他
- 本ページへのリンクはフリーです.
- 本ページへの無断転載を固く禁じます.
メンバー
准教授
野田 幸矢

- 2014年,東京工業大学大学院 理工学研究科 機械宇宙システム専攻 修士課程修了
- 2017年,東京工業大学大学院 総合理工学研究科 メカノマイクロ工学専攻 単位取得退学
- 2017年,福島工業高等専門学校 機械システム工学科 助教
- 2022年,福島工業高等専門学校 機械システム工学科 准教授
- 現在,博士(工学)
専攻科
生田目 迅
本科5年
金田 武也
齋藤 臣
西山 遙人
本田 葵大
Mohamad Faris Fitri Bin Mohd Azizi
本科4年
荒木 結衣
川口 晋哉
平 晃伎
村岡 央翔
渡邉 一心
研究内容
災害救助ロボット,医療ロボットに従事しています. 構造力学,機構学的切り口で問題を解決することを得意としています.板ばねの座屈を利用した力リミッタ付き鉗子


研究トップに戻る
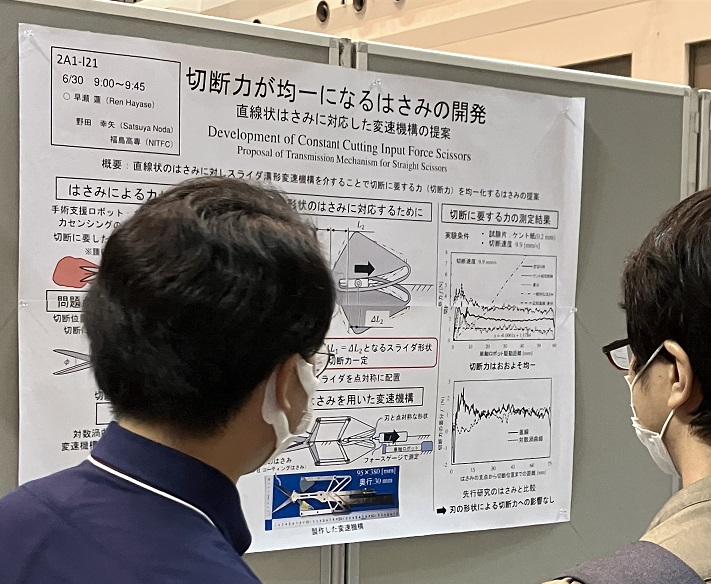
切断に要する力が切断位置に依存しないはさみ


研究トップに戻る
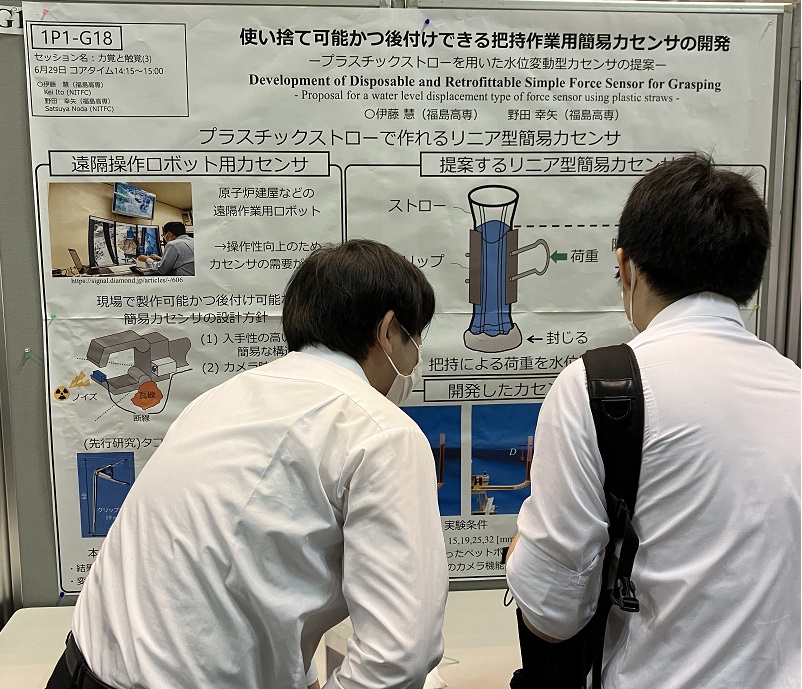
鉗子用力センサの開発

研究トップに戻る
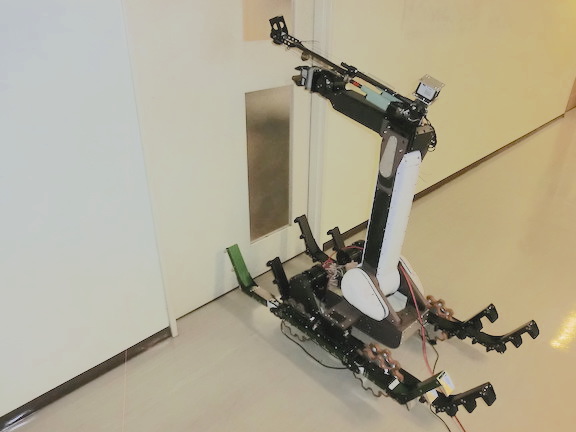
原子力災害対応ロボットHELIOS Xの開発
研究トップに戻る
業績
Research mapのサイトをご覧ください.教育活動
通常授業
- 機械製図II
- 設計製図I
- ロボット基礎
- ロボット制御工学
- ロボット工学
- 応用設計製図
- 応用メカトロニクス(専攻科科目)
- 制御システム工学(専攻科科目)
出前授業
ものをつくる楽しさを体感してもらうため,小・中学生対象に出前授業を行なっています.かわさきロボット
※画像準備中2015年度のかわさきロボット競技会に出場したロボットです. 足機構で走り角で相手のロボットを突き飛ばします.
指南車
※画像準備中方位磁針を用いなくても一定方向を指し続けるからくり機構です.
機械式マスタースレーブ
連絡先
snoda[at]fukushima-nct.ac.jp
※スパム防止のため[at]をアットマーク(@)に変更してください